Professor Pete Shirlow
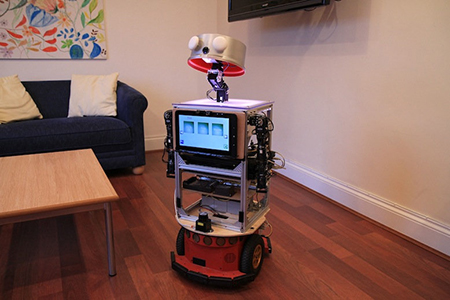
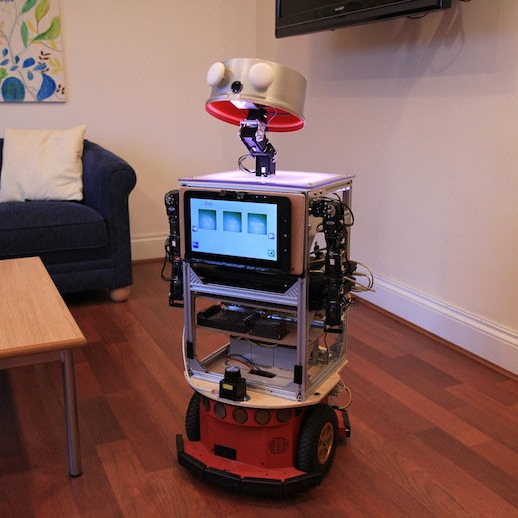
The Sunflower robot, developed by the University of Hertfordshire, has been used to examine home-assistance scenarios in which physical and/or cognitive assistance was provided to human volunteers
The University of Liverpool is part of a UK project that aims to ensure that future robotic systems can be trusted by humans.
Robots are increasingly being developed to serve as active “helpers” in situations where humans require assistance to undertake certain tasks. This means that the humans involved must be fully confident in robot behaviour if human-robot teamwork is to become viable and productive.
Sophisticated interactions
The “Trustworthy Robotic Assistants” project which totals £1.2million will explore how robots can participate in sophisticated interactions with humans in an increasingly safe and trustworthy manner.
Funded by Engineering and Physical Sciences Research Council (EPSRC), that It will address issues concerning the barriers between the robot and the human that have hampered the development of human-robot interactions, and will look at not only whether the robot makes safe moves but whether it knowingly or deliberately makes unsafe moves.

Care-o-bot, also developed by the University of Hertfordshire, at work at Robot House
Professor Michael Fisher, principal investigator at Liverpool and Director of the University’s Centre for Autonomous Systems Technology said: “The assessment of robotic trustworthiness has many facets, from the safety analysis of robot behaviours, through physical reliability of interactions, to human perceptions of such safe operation.”
The project involves teams from the University of Liverpool’s Centre for Autonomous Systems Technology (led by Professor Michael Fisher and Dr. Clare Dixon), the University of Hertfordshire’s Adaptive Systems Research Group, and the Bristol Robotics Laboratory, as well as Industrial partners including the British Automation and Robot Association (BARA) and RU Robots Limited.
Liverpool’s researchers are internationally recognised for their research on logic, formal analysis, and the foundations of autonomy and, both within the multidisciplinary Centre for Autonomous SystemsTechnology and within the “Trustworthy Robotic Assistants” project, their role is to provide a rigorous formal basis for developing reliable, safe and trustworthy autonomous systems.